CASE STUDY
Airborne Laser Scanning for Corridor Mapping: Georeferencing with Tightly-coupled Multi-view LiDAR
Airborne laser scanning enables efficient acquisition of 3D point clouds, particularly in corridor mapping applications. This article presents a georeferencing workflow which integrates GNSS, and IMU and LiDAR data within a non-linear least-squares adjustment framework.

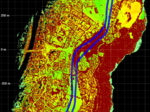
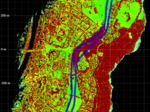
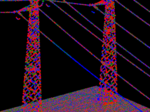
Corridor mapping poses difficulties for navigation and georeferencing due to the lack of turns or other dynamics, which leads to drift in the estimated trajectory, especially the aircraft heading. The use of strip adjustment or similar techniques is standard in airborne laser scanning, but the benefits are limited in corridor mapping as point cloud overlap is intentionally minimized in order to maximize ground covered in a given time frame. The proposed georeferencing approach aims to improve georeferencing in two ways: (1) tight coupling of IMU and LiDAR data allows for better in-run estimation of IMU errors and thereby improves the overall accuracy of trajectory and georeferenced point cloud, and (2) the use of a multi-view laser scanner effectively creates point cloud overlap within a single pass of the corridor by scanning in three distinct viewing directions (nadir, forward, backward). This georeferencing approach is presented and applied to power line corridor mapping, specifically an airborne laser scanning dataset acquired with a helicopter, and is evaluated based on trajectory and point cloud. The results show that the use of multi-view LiDAR within the trajectory estimation mitigates heading drift even with only a single pass of the corridor.
The dataset was acquired using a RIEGL VUX-16023 laser scanner, featuring a wide field of view of 100° and a multi-view scan geometry (nadir, forward, backward). This enables dense and consistent point cloud coverage even in narrow or linearly structured environments such as utility corridors. Integrated with the RiLOC-E25 IMU/GNSS navigation system, the entire sensor suite was mounted on a helicopter platform, allowing for low-altitude and high-precision data capture along a 30 km power line in South Tyrol, Italy. The presented georeferencing approach is implemented in RIEGL’s RiPROCESS software for RiLOC systems.
The authors thank Alto Drones GmbH carrying out the ALS data acquisition and on-site RTK survey.
The full paper is published on the ISPRS platform, and can be found here.